ELECTRONICS
CLASS 1
const int red_led_pin = 3; //מספר הפין אליו מחוברת נורה אדומה
const int yellow_led_pin=2; //מספר הפין אליו מחוברת נורה צהובה
const int green_led_pin=11; //מספר הפין אליו מחוברת נורה ירוקה
int dtime=70; //משתנה ראשון לזמן
int dtime2=100; //משתנה שני לזמן
void setup() {
pinMode(red_led_pin, OUTPUT); //מגדיר את נורה אדומה כפלט
pinMode( yellow_led_pin, OUTPUT); //מגדיר את נורה צהובה כפלט
pinMode( green_led_pin, OUTPUT); //מגדיר את נורה ירוקה כפלט
}
void loop() {
digitalWrite(yellow_led_pin, HIGH); //הדלק נורה צהובה
delay(dtime); //המתן פחות משניה
digitalWrite(yellow_led_pin, LOW); //כבה נורה צהובה
delay(dtime); //המתן פחות משניה
digitalWrite(yellow_led_pin, HIGH);
delay(dtime);
digitalWrite(yellow_led_pin, LOW);
delay(dtime2);
digitalWrite(red_led_pin, HIGH);
delay (dtime);
digitalWrite(red_led_pin, LOW);
delay(dtime);
digitalWrite(red_led_pin, HIGH);
delay (dtime);
digitalWrite(red_led_pin, LOW);
delay(dtime2);
digitalWrite(green_led_pin, HIGH);
delay(dtime);
digitalWrite(green_led_pin, LOW);
delay(dtime);
digitalWrite(green_led_pin, HIGH);
delay(dtime);
digitalWrite(green_led_pin, LOW);
delay(dtime2);
}

CLASS 3
const int Rpin= 9;
const int Gpin= 10;
const int Bpin= 11;
void setup() {
pinMode(Rpin, OUTPUT);
pinMode(Gpin, OUTPUT);
pinMode(Bpin, OUTPUT);
}
void loop() {
for (int i=0; i<=255; i++){ //הלולאה רצה על כל הגוונים מאדום עד צהוב
analogWrite(Rpin, 255);
analogWrite(Gpin, i);
analogWrite(Bpin, 0);
delay(10);
}
for (int i=255; i>=0; i--){ //הלולאה רצה על הגוונים מצהוב עד אדום
analogWrite(Rpin, 255);
analogWrite(Gpin, i);
analogWrite(Bpin, 0);
delay(10);
}
}
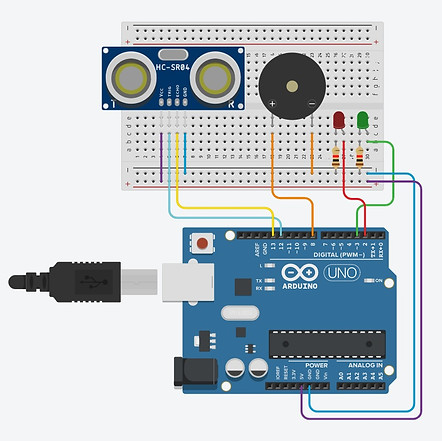
CLASS 4- Final assignment

const int echo=13; //מספר פין אליו מחובר פין אקו
const int trig=12; //מספר פין אליו מחובר פין טריג
const int red_led_pin = 2; //נורה אדומה מחוברת לפין 2
const int green_led_pin=3; //נורה ירוקה מחוברת לפין 3
const int buzz_pin=8; //הבאזר מחובר לפין 8
int duration=0; //משתנה למשך תנועת גלי הקול
int distance=0; //משתנה למדידת המרחק
int sec=0; //משתנה לזמן
void setup() {
pinMode(trig, OUTPUT); //הגדרת הטריג כפלט
pinMode(echo, INPUT); //הגדרת האקו כקלט
pinMode(red_led_pin, OUTPUT); //הגדרת נורה אדומה כפלט
pinMode(green_led_pin, OUTPUT); //הגדרת נורה ירוקה כפלט
pinMode(buzz_pin,OUTPUT); //הגדרת הבאזר כפלט
Serial.begin(9600); //הגדרת מהירות התחלתית להעברת נתונים
}
void loop() {
//מגדיר את הטריג פעיל למשך 1000 מיקרו שניות
digitalWrite(trig, HIGH);
delayMicroseconds(1000);
digitalWrite(trig, LOW);
duration= pulseIn(echo, HIGH); //קורא את האקו ומחזיר את זמן גלי הקול במיקרו שניות
distance= (duration/2) / 28.5; //חישוב מרחק
Serial.println(distance); //מציג את המרחק
if (distance<=4 && distance!=0){ //אם המרחק קטן מ4 ס"מ ולא שווה ל0 אז המשך
//הולך הרגל מגיע למעבר החצייה ומושמע צליל שקולט כי הוא הגיע והרמזור אדום לאחר כמה שניות הרמזור מתחלף לירוק ומושמע צליל אחר שמתמשך כמה שניות
digitalWrite(red_led_pin, HIGH); //נורה אדומה דלוקה
digitalWrite(green_led_pin, LOW); //נורה ירוקה כבויה
tone(buzz_pin, 3000 , 400); //הבאזר יצור טון בתדירות של 3000 הרץ למשך 400 אלפית השנייה
delay(300); //המתן
tone(buzz_pin, 2000 , 400);
delay(300);
tone(buzz_pin, 3000 , 400);
delay(2000);
digitalWrite(red_led_pin, LOW);
digitalWrite(green_led_pin, HIGH);
//לולאה שרצה 10 פעמים ומשמיעה צליל מהבאזר
for (sec=0; sec<10; sec++){
tone(buzz_pin, 1500, 200);
delay(500);
}
}
//כל עוד המרחק גדול מארבע ושווה לאפס הרמזור אדום
else{
digitalWrite(red_led_pin, HIGH);
digitalWrite(green_led_pin, LOW);
}
}